
Rolling Mill Automatic Flatness Control (AFC)
")
System Description
The TelePro/SSE AFC system consists of integrated control of work roll bending, HGC tilting, variable roll crown shifting (if available) and multi-zone work roll cooling to minimize deviations between target and measured exit strip stress distributions.
The application software is implemented in the ANSI/ISO Standard C and C++ programming languages. The AFC functions are typically performed in the same PC-based computer system hardware used to implement the automatic gauge control (AGC), interstand tension control (ITC) and mill setup models.
The following schematic diagram shows the overall layout of the AFC system for a 4-high mill with CVC work roll side shifting.
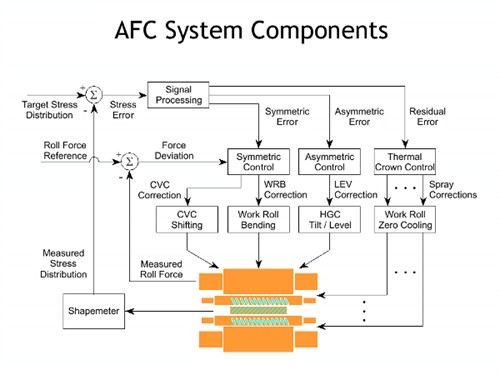
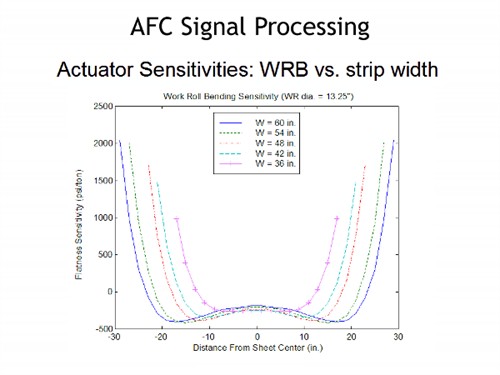
The signal processing function decomposes the shape error to determine the correction that must be made by each control actuator. Calculated shape influence sensitivities for the various actuators are used to perform the signal decomposition. These influence sensitivities characterize the form and magnitude of strip shape changes associated with changes in actuator settings (roll bending, roll crown, HGC level) and mill disturbances (roll force, thermal camber). Shape influence sensitivities vary as functions of:
- Mill geometry (roll diameters, face lengths, bearing centerlines, etc.)
- Material properties (width, thickness, hardness)
- Actuator operating point
Since overall performance of the AFC system depends strongly on the accuracy of the sensitivities used, model-based actuator influence sensitivity vectors are used instead of polynomial or other approximations.
The following diagram shows examples of influence sensitivity vectors calculated for the work roll bending (WRB) actuators at various strip widths.
After the shape error has been decomposed and the required actuator corrections are determined, the symmetric and asymmetric control functions simultaneously move the mechanical actuators (roll bending, CVC roll side shifting, and HGC tilting). The actuator movements are coordinated to eliminate shape defects characterized by the shape influence sensitivities for these actuators.
The response characteristics of these controllers depend on actuator dynamics and mill speed. The TelePro/SSE AFC continuously calculates controller gains in order to optimize closed-loop response at every mill speed, taking into account changing material transport delay and CVC shifting rates.
The symmetric control function includes a feedforward mechanism to anticipate and reject shape disturbances associated with roll separating force changes occurring during acceleration and deceleration, or due to incoming material variations.
The zone cooling control function varies the individual zone cooling rates to remove residual shape errors that remain after the mechanical actuators have made their corrections.
The zone cooling control also monitors the overall spray pattern to maintain a specified average level of coolant flow and to reduce asymmetry in the coolant distribution.
The AFC system includes the following functions and features:
- Product-dependent flatness actuator influence sensitivities calculated for each coil using fully-discretized roll stack deflection and strip shape models.
- Model-based decoupling of mechanical bending, tilt, and lateral roll shifting actuator controls from the multi-zone spray control.
- Multi-zone spray controls consisting of both residual shape and average spray level controllers.
- Delay-compensating feedback control algorithms continuously calculate controller gains to optimize system response at every rolling speed.
- Feedforward bending control based on separating force changes using fully discretized shape influence vectors to improve bending control during acceleration and deceleration and when changing gauge at coil heads and tails.
- Product-dependent selection of preset spray pattern, average spray target level, and exit stress distribution target.
- AFC control functions are performed at a 50-millisecond rate.
- Real-time process inputs, including shapemeter feedback, work roll bending pressures, and HGC cylinder positions and pressures, are acquired via high-speed digital communication link or by analog interface, depending on digital link performance, sensor capabilities and customer preference. Typical digital communication links include real-time ETHERNET and reflective memory interfaces to mill drive controls.
- Outputs to the work roll bending, HGC tilting, lateral roll shifting and work roll zone cooling device controls are via high-speed digital communication link or by analog interface, depending on control device capabilities, digital link performance and customer preference.
- Maintenance and diagnostic support tools are provided for monitoring the condition of key control functions. These include graphical controller monitoring displays showing the controller functional block diagrams with current values of important inputs, outputs, internal variables, and activation logic, updated in real time on the screen. Authorized personnel can modify certain system parameters on line through the screen.
- Additional system monitoring displays for actuator reference summing and product-dependent shape influence sensitivity calculation functions.
- A high-speed, real-time trend system, including tools for displaying and/or modifying any global system variable by name through an engineering workstation. Both graphical and tabular data display are provided.
- Secure, remote access to the diagnostic support displays via standard network connection.
System Architecture
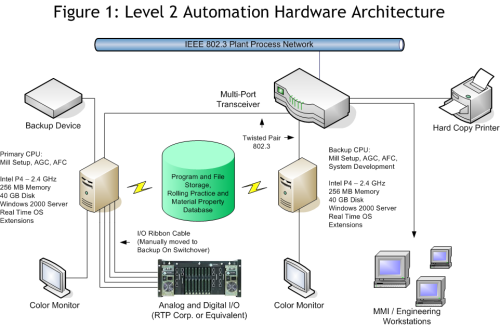
The system is implemented as a stand-alone AFC system. However, the same computer is typically used to host automatic gauge control (AGC), interstand tension control (ITC) and model setup calculations. The computing platform is the TelePro Tsentry product. It consists of an off-the-shelf Intel Pentium-class PC running the Windows 2003 Server operating system with VenturCom RTX real time extensions. This system comes complete with all facilities required to support deterministic real-time program repetition rates as fast as 1 millisecond.
In addition to performing sheet flatness control, the system includes both real-time and historical trending. Tsentry also provides a general-purpose real-time computing platform that includes all facilities and libraries required to allow the end user to develop and implement custom process monitoring, control, signal processing, and human-machine interface (HMI) applications. This system interfaces to several varieties of commercially available process I/O hardware and is capable of performing all process control and human-machine interface functions required for mill control. It was developed specifically as a high-speed real-time process control system platform.
The associated HMI displays are implemented as standard Internet web pages hosted by the Tsentry system. The standard Tsentry product includes all facilities required to develop and support a human-machine interface system based on standard web pages. These facilities include custom controls for building animated displays with Microsoft Visual Basic .NET. Automated processes are included for building web screens to execute the controls and for publishing the controls to client workstations. Any network-connected PC workstation with a standard web browser and proper security credentials can be used as an HMI client.
All hardware employs industry-standard, open-architecture systems commercially available from multiple equipment suppliers. Communication is via industry-standard TCP/IP protocol over ETHERNET. Graphical HMI/Engineering workstation displays are via standard Internet web pages allowing display using standard web browsers and screen building using standard web page development tools.
In a typical configuration, the Tsentry host computer is interfaced to RTP I/O hardware from RTP Corporation via an ETHERNET link available commercially from the I/O equipment manufacturer. Device driver software already in wide commercial use is supplied to manage the data exchange.
A fully-redundant backup CPU can be included in the architecture, but is not required. If the backup CPU is available, switchover from the primary CPU to the backup consists of simply moving network cables and re-assigning network addresses. This switchover can be performed manually in less than 15 minutes.
The automation architecture permits remote technical support through a secure ETHERNET connection. To enable remote support, the customer provides an ETHERNET LAN connection available to a trusted external site and a bridge to isolate the process control computers from the external network.
A typical hardware architecture design is shown in the following diagram:
A typical Tsentry host computer is configured as follows:
- 2.4 GHz Intel Pentium 4 CPU, 512 MB memory, CDRW drive
- 60 GByte hard disks
- 2 ETHERNET controllers:
- Backplane: Intel PRO 10/100 for process LAN connection
- 3COM 3C905-TX for control I/O LAN connection
The host system is a standard IBM-compatible personal computer and can be configured according to customer requirements. Though it is not required, this can include mirrored disk configurations, PC server architectures, and alternative PC form factors.
System software includes:
- Windows 2003 Server operating system
- Microsoft Visual Studio .NET software development environment
- VenturCom RTXreal-time operating system extensions
- TelePro TSENTRY real-time process control system libraries
- Microsoft Terminal Services
- Symantec PCAnywhere
Prior to commissioning, performance tests are conducted on all systems for extended periods of time to assure reliability.
Graphical HMI/Maintenance Support Displays
Graphical HMI and maintenance support displays are implemented as standard Internet web pages hosted by the Tsentry system. Any network-connected PC workstation with a standard web browser and proper security credentials can be used as an HMI client. This permits any HMI display to be accessed from any workstation within the production complex.
Displays are developed using a combination of Microsoft Visual Basic .NET and Active Server Pages. Complete facilities for developing and publishing custom HMI displays are provided to the end user.
The system includes a graphical operator's display, customized for each application, showing target and actual measured exit stress distributions, work roll zone spray flow levels, entry and exit thickness deviation trend plots, roll bending and HGC tilt feedback, separating force, mill speed, and other process variables. This display is updated once per second. A sample operator's display is shown in Figure 2 below:
Figure 2: Graphical Operator's Display

In addition to the HMI display unit installed in the operator's pulpit, additional HMI workstations can be located throughout the production complex: in computer rooms, maintenance work centers, and offices. Any of these workstations can be used to display the operator's display as well as any of the controller monitoring screens.
Examples of the maintenance support displays for AFC are shown in the Figures 3 through 5. Figure 3 is the top-level block diagram display for the work roll bending controller, which accepts a control increment from the AFC signal processing function and generates a work roll bending force (or pressure) correction. Figure 4 shows internal detail for the work roll bending PID controller. Figure 5 shows the AFC activation logic. Similar displays are provided for the HGC tilting, CVC roll shifting and zone cooling controls.
The full AFC system consists of approximately 30 HMI and system monitoring/support displays.
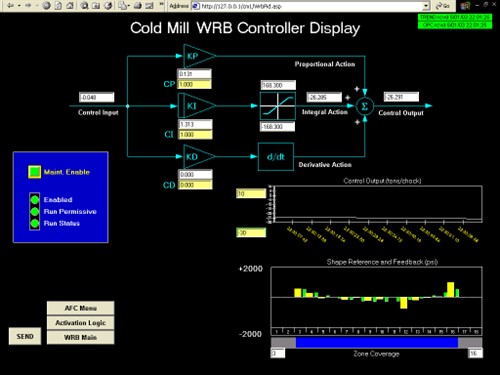
Figure 3: AFC Work Roll Bending Controller
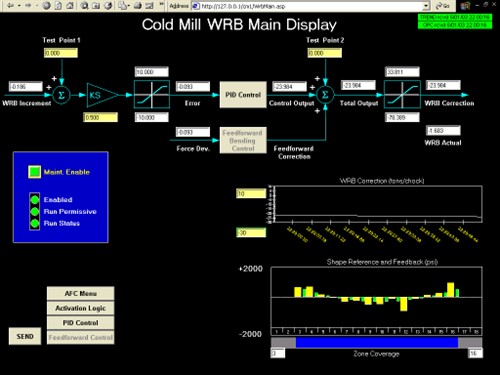
In the diagram above:
- Clicking on various portions of the diagram with a mouse device provides additional levels of detail. For example, clicking on the box marked "PID Control" produces the display shown in Figure 4.
- Gain KS is a commissioning value with nominal value 1.0 which can be changed directly on the display.
- Other values displayed on yellow backgrounds are data entry as well as display fields on the screen. Security is provided to assure that only authorized personnel are permitted to make parameter changes.
- The function buttons at the lower left of the screen switch to other system displays.
- Boxes at the lower right of the display are real-time variable trend plots and vector displays of critical controller variables.
Figure 4: AFC Work Roll Bending PID
In the diagram above:
- Gains KP, KI, and KD are controller parameters calculated continuously as functions of actuator response dynamics, mill speed, and desired closed-loop response.
- Gains CP, CI, and CD are commissioning values with nominal value 1.0 which can be changed directly on the display.
Figure 5: AFC Activation Logic Display
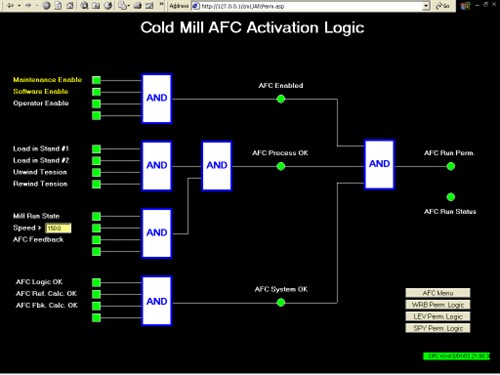
In the diagram above:
- True states are indicated by filling the associated box (for inputs) or circle (for outputs) with green. False states are indicated with red.
- The state of the maintenance enable logical can be changed by clicking with a mouse device directly on the state indicator.
Real-Time/Historical Trend Facility
The Tsentry computing platform provides a real-time/historical data trend facility which supports Internet web page based editing and display of process variables. Data may be displayed and edited from a browser run on the system console or on any network-connected Windows workstation. Both graphical and tabular data displays are provided.
The real-time/historical trend system includes the following functions and features:
- Access by name to any process variable in host global shared memory by means of a data dictionary.
- Data dictionary build process. This process automatically updates the global shared memory data dictionary when new variables are added to the system and old ones are deleted.
- Real-time trend data acquisition. Data is acquired at a 20-millisecond rate (50 samples per second per point) and made available for display on networked HMI/maintenance support workstations.
- Real-time trend data display. Web page screens are provided for graphical and tabular display of high-speed, real-time data.
- Display pan and zoom features.
- Trend data can be exported as individual Windows files.
- Storage, retrieval, and editing of trend set files, which define graphical and tabular data display configurations: variable names, scaling, display attributes.
- Dynamic trend display editing allows interactive modification of trended variable names, time scales, signal magnitude scales, and text display formats.
- Historical trend display integrated with real-time trend displays.
- Facilities for starting and stopping historical trend data acquisition based on user-defined trigger events.
- Support for multiple variable types: floats, integers, character strings, booleans.
- Multiple value display formats: float, character, decimal integer, hexadecimal integer, and binary.
- Process variable "Probe" screen. A web page is provided for displaying and modifying any process variable in shared memory by name. The screen is accessible from a web browser run on the system console or on any networked Windows workstation. Data write access can be password protected.
- Process variable "ProbeA" screen. Same functionality as "Probe" for multidimensional array data objects.
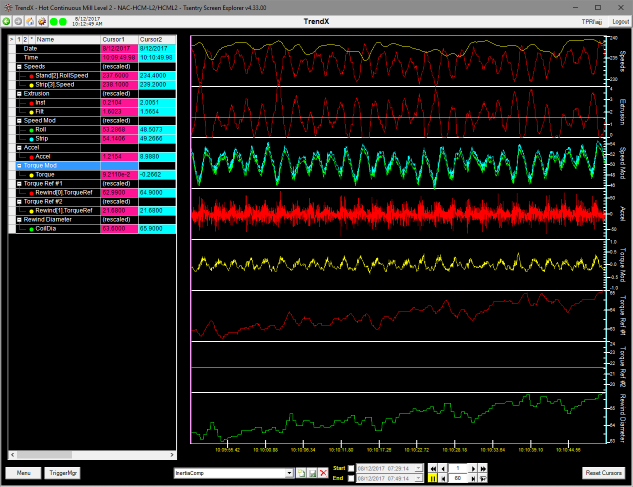
- Process variable "TrendX" screen. View up to 24 simultaneous signal trends in real time on up to six independent Y axes.
Examples of the Probe and TrendX screens are shown in the Figures 6 and 7.
Figure 6: Process Variable "Probe" Screen
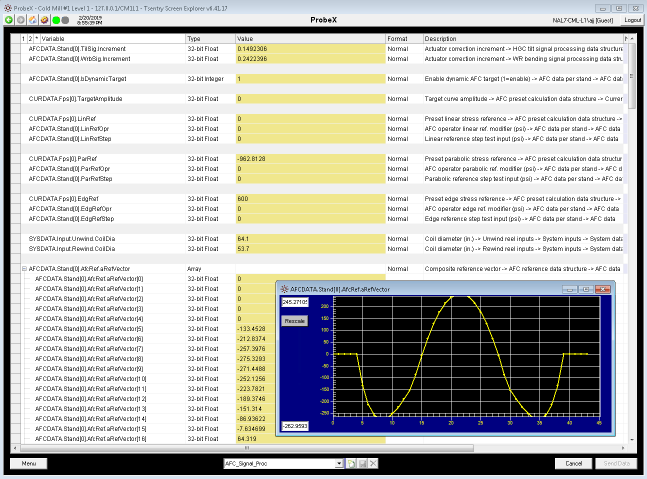
Figure 7: Process Variable "TRENDX" Screen
Conclusion
This system consists of standard TelePro/SSE rolling process control technology tailored to the specific needs of each customer. The use of proven automation products improves system reliability and reduces the time required for engineering, development, installation and commissioning. These standard products are customized for each application in the areas of: system sequencing, operator interface requirements, maintenance and diagnostic support tools, mill-specific equipment interfaces, and the plant scheduling interface. The use of standard, open-architecture system components allows for configuration flexibility and eliminates special-purpose hardware/software.
TelePro/SSE mill automation systems are designed, developed, commissioned and supported by engineers with extensive process control experience on all types of rolling mills. We have spent many years working directly with plant technical and operating personnel to understand the functional requirements for these systems. Our process understanding and system integration expertise make us uniquely qualified to deliver the highest levels of performance and reliability across a wide range of product and process conditions.